

Shape-changing wheel inspired by the surface tension of water absorbs bumps
Inspired by the surface tension of a drop of liquid, researchers have developed an adjustable wheel that changes shape in real time and handles uneven surfaces and tall obstacles with ease. It opens the door to developing wheelchairs or mobile robots that can better handle rough terrain.
Wheels are an essential part of cars, trucks and bicycles, and are so ubiquitous that we often take them for granted. But when it comes to wheelchairs, the wheels’ poor performance when traversing uneven or obstructed surfaces means that wheelchair users are mostly forced to stay on the road. The same is true for mobile robots.
Now a group of Korean researchers has literally reinvented the wheel: They have developed an adjustable wheel that changes shape in real time to overcome obstacles on the ground, enabling travel off the beaten track.
OK, “reinventing the wheel” is probably an exaggeration. A few years ago, tire giant Hankook collaborated with Seoul National University and Harvard to develop transformable wheels inspired by origami. Many years before that, graduate student Ackeem Ngwenya developed his “Roadless” wheel system, whose profile could be adjusted from narrow to wide by turning a screw. And in between, NASA developed tires for its rovers made of a nickel-titanium alloy that could deform all the way to the axle and then return to their original shape.
The problem of uneven or obstacle-strewn ground can be overcome by a crawler-based propulsion system, a specially designed mechanism that increases the surface area of the wheels. However, a crawler-based system is limited to relatively low speeds and consumes more energy than a wheeled system due to the high friction created by the increased contact between the system and the ground.
The use of airless tires offers the advantage of being resistant to punctures, leaks and bursting when traveling over rough terrain. However, their rigidity means they are not particularly suitable for overcoming obstacles, especially high ones, as they are less deformable or less able to adapt to the surface they are traveling over.

^ Lee et al.
Inspired by the surface tension of a liquid droplet, the scientists developed a wheel with variable stiffness that can overcome rough terrain and obstacles while retaining the advantages of a regular wheel when traveling on flat ground. The surface tension of a liquid is caused by an imbalance of attractive or cohesive forces between molecules. While a molecule in the bulk of a liquid experiences cohesive forces with other molecules in all directions, a molecule on the surface of a liquid experiences net cohesive forces directed only inward. In a droplet, as the cohesive force of the surface molecules increases, so does the net force pulling the liquid molecules inward, causing the droplet to return to a round shape.
Test the two-wheeled wheelchair on a flat surface
A key aspect of the deformable wheel is its “smart chain” structure, which consists of a chain of blocks around the outside of the wheel connected by wire spokes to opposite sides of a central hub. By changing the distance between the two sides of the hub, the researchers were able to vary the length of the spokes and thus the shape of the outer chain of blocks. By increasing the hub spacing, the spokes shortened, pushing the chain block inward and creating a circular wheel for fast locomotion. By decreasing the size, the wire spokes lengthened and the chain block loosened, allowing it to deform and travel over obstacles it encountered.
Test drive with the two-wheeled wheelchair over grass
The researchers tested their adaptable wheel in a two-wheeled wheelchair and a four-wheeled vehicle and found that all could adapt to and negotiate large steps and irregularly shaped rocks 1.2 times higher than the wheel radius.
The video above shows the two-wheeled wheelchair system, which weighs 120kg, easily tackling uneven, grassy ground – although the chair’s extreme forward tilt raises concerns for the safety of its eventual occupant. The researchers did not provide video of the four-wheeled vehicle in action, but images can be found below.
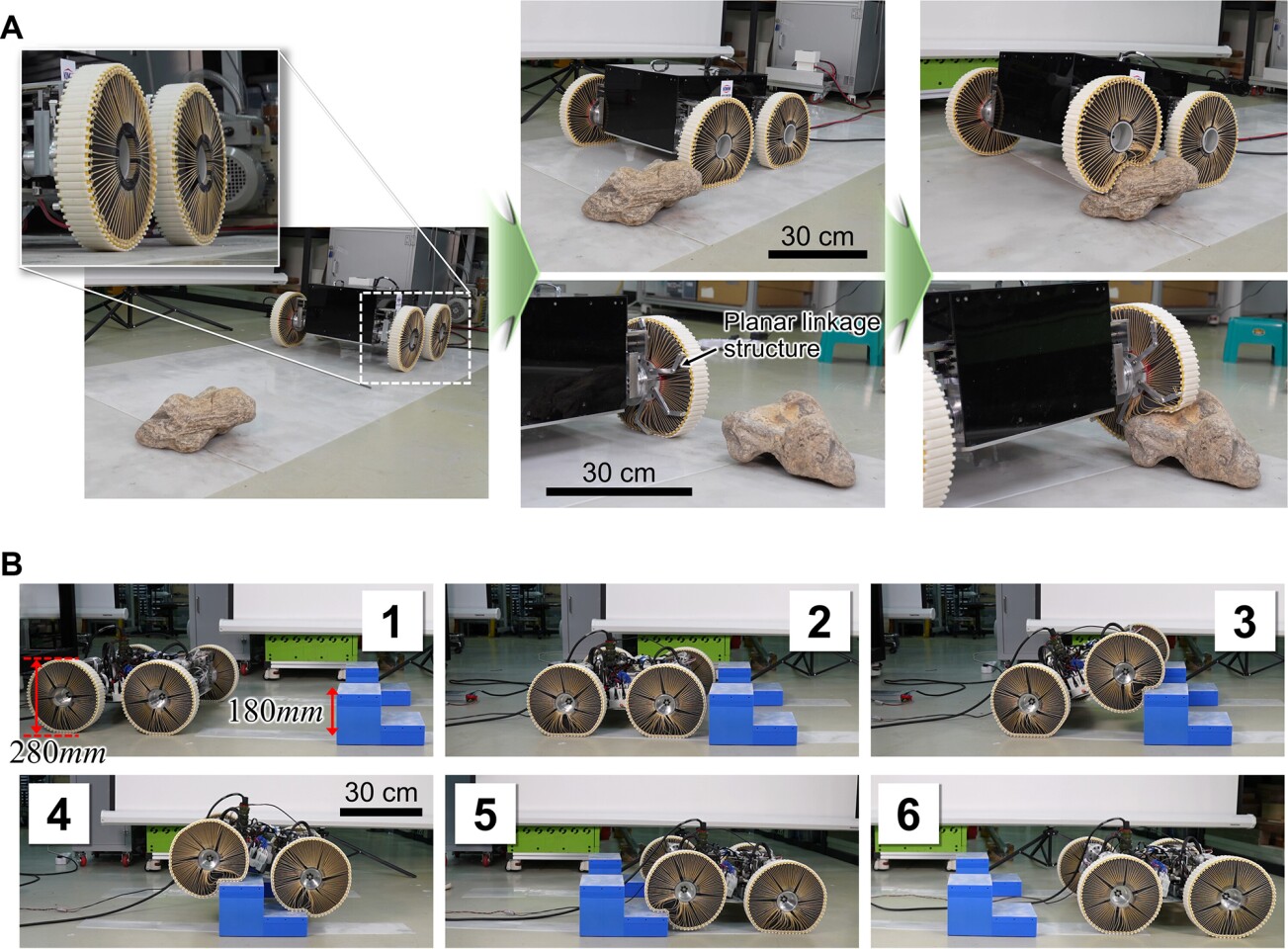
^ Lee et al.
The researchers found that dust and particles were getting into the areas between the smart track blocks and damaging the wheel, so they are working on adding a wheel cover to future versions. They see great potential in their customizable wheel.
“This study demonstrates real-time stiffness variations at the scale of actual wheelchair wheels and suggests broader, common applications in wheel-based robots and transportation systems for efficient driving on uneven terrain,” the researchers said.
The study was published in the journal Science Robotics.
Source: EurekAlert!
